Dear All,
There were a number of concerns raised regarding the Mobility requirement for IMT-2020. Let me attempt to address those concerns and share some thoughts on why I think it would be possible to meet the Mobility Requirements.
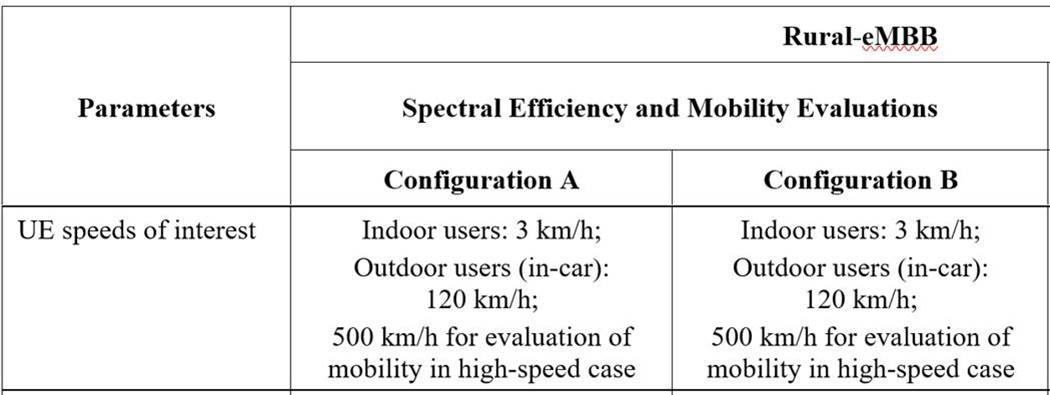
First, for everyone’s benefit, let me state the requirements are (Source: ITU-R WP5D Doc. 5/40: “Minimum requirements related to technical performance for IMT-2020 radio interface(s)”). In the Table below, the spectral efficiency requirements at the various speeds are summarized. (For Reference, the average spectral efficiency requirement for Indoor Hotspot is 9 b/s/Hz!

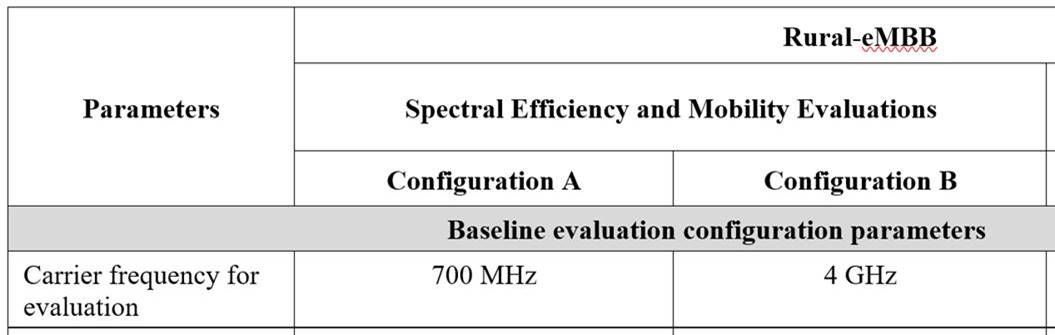
Next, please note that the 500 km/hr requirement is to be met for 700 MHz or 4 GHz (NOT for 30 GHz or 70 GHz) (Source: "Guidelines for evaluation of radio interface technologies for IMT-2020" (Doc. 5/57))
Now, having established the requirements, let’s look at the arguments below. My goal is to develop an engineering intuition that most people interested in technical aspects can follow. For instance, in the case of single path LoS scenario:
- As would be clear to most of you, Doppler frequency is not really the concern., the Doppler frequency is largely canceled by CFO methods in preamble. There are two CFO/Doppler components that aren’t canceled
- Residual CFO/Doppler (since CFO/Doppler estimation isn’t perfect)
- Change in CFO or Doppler throughout the duration of packet
- The residual CFO is handled via common phase error estimation/correction through pilots.
- The real concern then is the change in Doppler frequency over the duration of the packet (the derivative). As long as the phase doesn’t change much from the beginning of the OFDM symbol to the end (12.8us for 802.11ax), we’re fine.
- Let’s assume that we can suffer 2pi/8 (45-deg) rotation from beginning to end of OFDM symbol. (See below for a bit more details about the 45 degree rotation). This means that means we can handle Doppler frequency change of 1/8/12.8e-6 which is approximately 10 kHz as long as channel/phase tracking algorithms can keep up.
- At 500 km/hr (139 m/s), the maximum doppler frequency for 700 MHz and 4 GHz (remember we only need to do 500 km/hr for these two bands) and 30 GHz and 500 km/hr (139m/s), our maximum Doppler frequency is approximately 0.3 kHz and 2 kHz respectively è well below the 10 kHz!
- The next objection could be that mobility also causes the channel impulse response amplitude to change over time.
- However, at 500 km/hr (139 m/s), for packet durations of 1, 2 and 3 ms, the receiver will have travelled a mere .139 m, .278 m, and .417 m respectively – which will constitute a practically insignificant difference in the path loss
- And in addition the above, we should keep in mind there are also many existing practices on how to update channels on a per-OFDM symbol basis through pilot interpolation or decision directed channel estimation (decode symbol, then use decoded symbol as training). The 802.11 protocol can handle the mobility as long as the vendor considers it during implementation
- Further note that 11ax also defines a midamble which will help mitigate the problem even further (The above analysis is even without assuming any midamble).
- For those who may be worried about beamforming feedback in mobility, could think of the fact that 802.11 also offers open loop strategies
As mentioned earlier, this was meant to aid with the engineering intuition. Those looking for some reasonable handle on how we could go about handling the mobility requirements, will have hopefully gotten some insights through the above analysis.
Thanks and Kind Regards
Rakesh
=== Additional details on the phase rotation ====
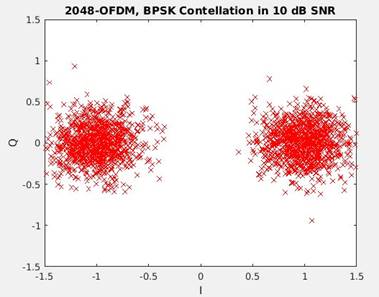
- Let’s assume we can suffer 2pi/8 (45-deg) rotation from beginning to end of OFDM symbol. For example see the plot of BPSK in 10 dB SNR with perfect CFO correction and then compare it when there is a pi/4 rotation from beginning to end of OFDM symbol. This increasing phase rotation over the OFDM symbol turns the circular constellation points into ellipses and also rotations them about their axes.
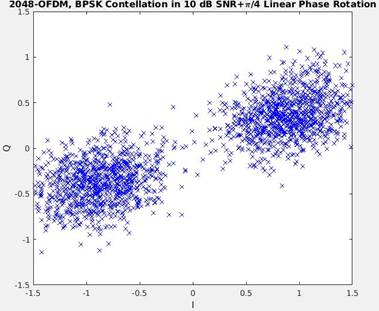
- Nevertheless, onecan see that we can handle 0 to pi/4 phase rotation over the OFDM symbol. This means that we can handle Doppler frequency change of 1/8/12.8e-6 which is approximately 10 kHz as long as channel/phase tracking algorithms can keep up.
- At 4 GHz and 500 km/hr (139m/s), our maximum Doppler frequency is 2 kHz (assuming UE moving right toward base station). If we assume a 1 msec packet that means that a 500 km/hr vehicle travels 0.139m while the packet is in the air.
- As long as the receiver implements good phase and channel tracking, we can assume the protocol can handle these very high speeds.